Kursy • Poradniki • Inspirujące DIY • Forum





Robot Światłolub - co warto wiedzieć?
Światłolub to popularne określenie na robota, którego celem jest podążanie w kierunku światła, a konkretnie w kierunku najsilniejszego źródła światła. W najprostszej wersji, taki pojazd potrzebuje tylko dwóch prostych czujników oraz elementu sterującego pracą 2 silników.
Kiedyś początkujący majsterkowicze budowali proste światłoluby z użyciem tranzystorów lub samego sterownika silników (takiego jak np. L293D). Większość prostych światłolubów wymaga kalibracji do pracy w danych warunkach środowiskach – przy pomocy odpowiedniego dzielnika napięcia (dobranie rezystorów) lub za pomocą zmian ustawień potencjometru. Odpowiednio skalibrowany światłolub jest w stanie podążać za światłem latarki nawet w jasny dzień.
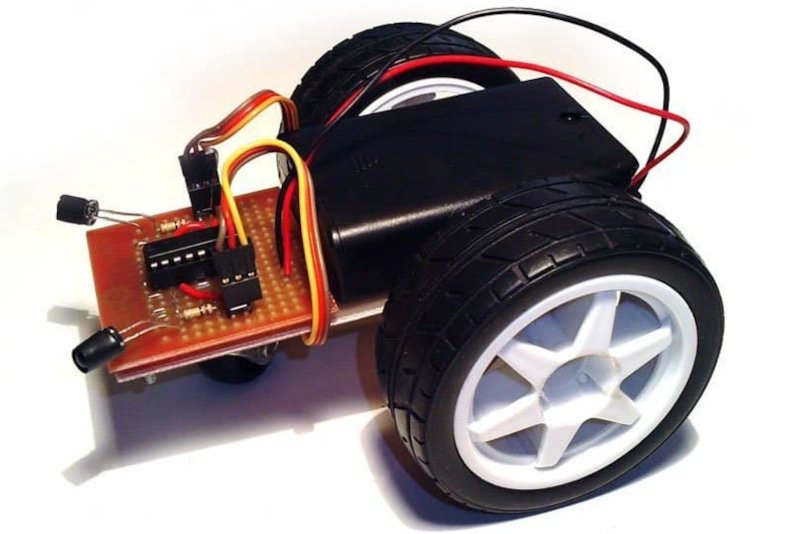
Przykładowy światłolub zbudowany na bazie L293D
Aktualnie funkcja śledzenia najsilniejszego źródła światła jest dodawana do bardziej rozbudowanych konstrukcji, które na swoim pokładzie mają np. Arduino UNO. W takiej sytuacji działanie robota jest zależne od programu, możliwe jest więc dodanie automatycznej kalibracji czujników. Przykład budowy światłoluba na bazie Arduino został opisany w naszym kursie budowy robotów:
Kurs budowy robotów – #6 – Światłolub (sterowanie latarką)
Gdy Arduino nie było jeszcze popularne, dużo początkujących szukało poradników opisujących budowę robotów bez mikrokontrolerów.... Czytaj dalej »
Chcesz wiedzieć więcej? Zadaj pytanie na naszym forum o elektronice - chętnie doradzimy!
Robot Światłolub - artykuły powiązane tematycznie











Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




