Kursy • Poradniki • Inspirujące DIY • Forum





Silnik krokowy - co warto wiedzieć?
Silnik krokowy (inaczej silnik skokowy) to silnik elektryczny, który zamiast płynnego obrotu, wykonuje serię „przeskoków” (tzw. kroków) o określony, mały kąt (zależny od konkretnego modelu). Wewnątrz takich silników znaleźć można kilka cewek – zasilenie ich w odpowiedniej kolejności wymusza ruch wirnika. Szybkie przełączanie pomiędzy odpowiednimi cewkami powoduje płynny ruch obrotowy.
Do sterowania silnikiem krokowym wymagane są specjalne sterowniki, które będą załączały napięcie na kolejnych cewkach. Odpowiednia konfiguracja kolejno załączanych cewek umożliwia uzyskanie tzw. sterowania mikrokrokowego, gdzie rotor może obrócić się o kąt mniejszy, niż znamionowy.
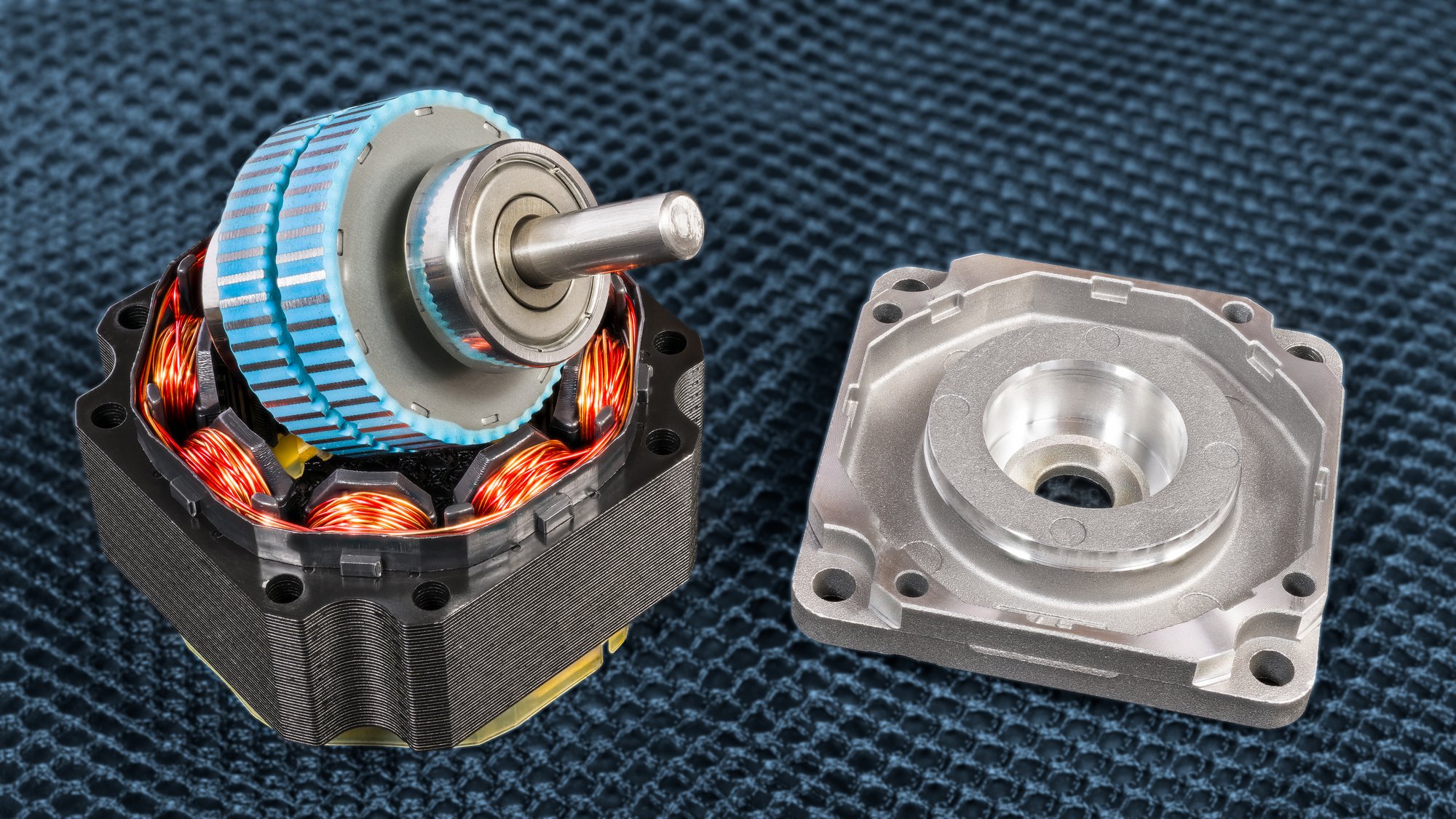
Wnętrze silnika krokowego
Kąt obrotu uzależniony jest od ilości impulsów wysyłanych przez sterownik, dzięki czemu w niektórych aplikacjach można zrezygnować ze sprzężenia zwrotnego np. z enkoderów. Do największych wad należy stały i stosunkowo wysoki pobór prądu (niezależnie od stanu pracy silnika), wynikające z tego straty cieplne (obudowa potrafi się nagrzać do wysokich temperatur), a także niskie maksymalne obroty (w porównaniu np. z silnikami DC). W niektórych sytuacjach występuje również zjawisko gubienia kroków, co może mieć zgubny wpływ na aplikacje wykorzystujące silnik w pętli otwartej sterowania.
Najważniejszą zaletą silnika krokowego jest utrzymywanie dużego momentu obrotowego przy zatrzymanej osi (moment ten maleje wraz ze wzrostem prędkości obrotowej).
Więcej informacji na temat silników tego typu znaleźć można w osobnym artykule:
Jak działa silnik krokowy?
Jednym z najczęściej wykorzystywanych typów silników w mechatronice są silniki krokowe. Znają je bardzo dobrze posiadacze drukarek 3D oraz... Czytaj dalej »
Chcesz wiedzieć więcej? Zadaj pytanie na naszym forum o elektronice - chętnie doradzimy!
Silnik krokowy - artykuły powiązane tematycznie













Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




