Kursy • Poradniki • Inspirujące DIY • Forum





Robot Biped - co warto wiedzieć?
Biped to w przyrodzie każdy organizm poruszający się na dwóch nogach, w robotyce jest to potoczna nazwa dla robota dwunożnego. Pochodzi od łacińskich słów „bi” - dwa i „ped” - stopa.
Amatorskie dwunożne roboty mają obecnie dość prostą konstrukcję, opartą na połączonych ze sobą serwach modelarskich. Im większa liczba serw przypadających na nogę, tym na ogół większy zakres ruchu i możliwości balansowania, co pozwala nieraz na uzyskanie chodu dynamicznego – jest to taki typ chodu, w którym środek ciężkości przesuwa się poza obszar stabilności w kontrolowany sposób.
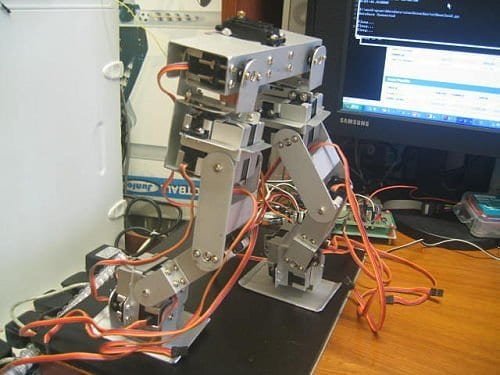
Przykładowy biped zbudowany w warunkach amatorskich
Chód dynamiczny jest charakterystyczny dla ludzkiego sposobu poruszania się. Wymaga odpowiednio silnych i szybkich napędów oraz „przeciwwagi” kontrolującej położenie środka ciężkości (w wypadku ludzi jest to tułów i ręce). Więcej informacji na temat takich konstrukcji znaleźć można w poniższych poradnikach opublikowanych na naszym forum:
Chcesz wiedzieć więcej? Zadaj pytanie na naszym forum o elektronice - chętnie doradzimy!
Robot Biped - artykuły powiązane tematycznie












Dołącz do 20 tysięcy osób, które otrzymują powiadomienia o nowych artykułach! Zapisz się, a otrzymasz PDF-y ze ściągami (m.in. na temat mocy, tranzystorów, diod i schematów) oraz listę inspirujących DIY z Arduino i RPi.




